Robofish: How Color and Tail Wagging Helped Bring a Robot Fish to “Life”


In an age of 3D printing and bionic limbs, distinctions between the manmade and the natural can sometimes blur. Take, for example, the case of the robotic fish depicted above (part A). This little guy is modeled after Notemigonus crysoleucas (image, part B), also known as the golden shiner, and in a recent PLOS ONE study, researchers put it to the test: can a robotic fish influence the behavior of a real fish, and if so, what characteristics enable the robotic fish to do so? According to the researchers at Polytechnic Institute of New York University, answers may depend on the robot fish’s color and the frequency with which it waggles its tail.
To find out more, the authors commissioned the making of two robot fish for this study: one gray and one red. While both physically modeled the golden shiner in many respects, only the gray robot fish was painted to mimic its real-life counterpart. Other than color, the two robots were identical: both consisted of three rigid parts, connected on hinges, and sported silicone tail fins.
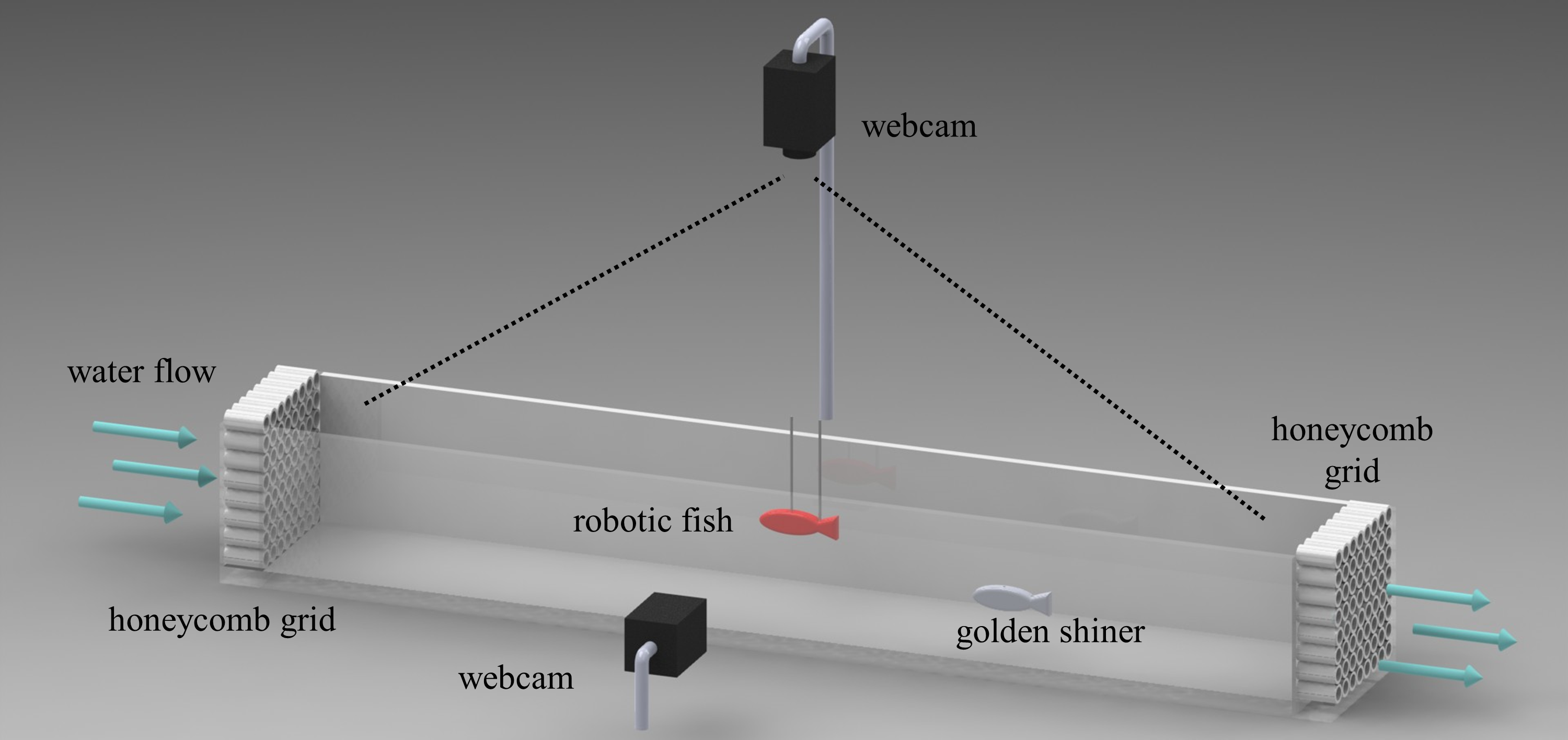
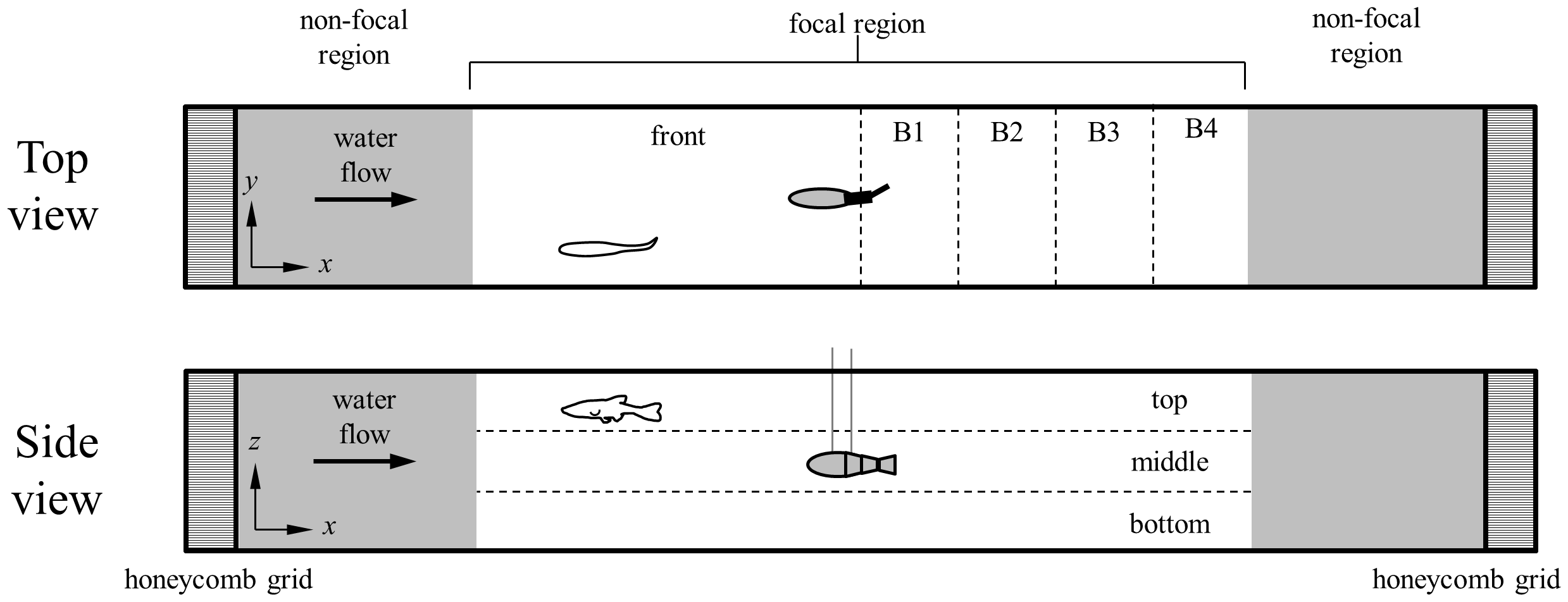
As illustrated above, one robot fish was placed in a water tunnel with a real fish during each trial. The real fish was free to swim in the tunnel while the robot fish “swam,” or waggled its tail fin, in the center of the apparatus. The robotic fish’s tail waggled at various frequencies, ranging from 0 Hz to 4 Hz, as webcams tracked the real fish’s movements. The middle of the tunnel was designated the “focal region” to indicate where fish and robot interaction was likely to occur. The researchers further divided the region behind the fish into four parts, explaining that the robot fish’s tail wagging was likely to affect the water flow, and thus the real fish’s behavior, in this area.
After reviewing the webcam footage, they found that neither factor (color, tail wagging frequency) working alone had a significant impact on the real fish’s swimming behavior. However, when the gray robot wagged its tail at 3 Hz, the real fish spent a significantly longer time swimming in the center of the tunnel, preferring to spend most of its time swimming right behind the robot. When this happened, the wake created by the robot’s tail wagging could allow the real fish to reduce its energy expenditure while swimming.
What’s so special about wagging your tail fin at 3 Hz, you ask? The researchers ascertained through preliminary research that when golden shiners swim, their tails waggle at 3.32 Hz. In addition, the gray robot’s coloring may have been more attractive to the golden shiner than the red robot’s, as it may have elicited a likeness-related social response in the real shiner. This suggestion is in line with other robot work in comparable fish species.
In other words, the robot fish exerted the most influence—or was the most convincing to the real fish—when its coloring and movements closely corresponded to the coloring and movements of a real fish. Go figure!
If you are interested in learning more, visit our website and see what others had to say.
Citation: Polverino G, Phamduy P, Porfiri M (2013) Fish and Robots Swimming Together in a Water Tunnel: Robot Color and Tail-Beat Frequency Influence Fish Behavior. PLoS ONE 8(10): e77589. doi:10.1371/journal.pone.0077589
Image 1: Figure 1 from the paper
Image 2: Figure 2 from the paper
Image 3: Figure 4 from the paper